Emmanuel Ablo
Mechanical Engineer | Robotics & AI | 📧 emmanuelablo01@gmail.com | 🔗 LinkedIn | GitHub
About Me
Mechanical Engineer with strong foundations in mechanical design, electromechanics, machine automation, and industrial troubleshooting. Experienced in CAD modeling, mechanical systems integration, maintenance, and prototyping. Complemented by solid skills in robotics (ROS2, SLAM, control), experimental validation, and sensor integration. Able to work across the full engineering pipeline, from mechanical conception and simulation to implementation on real equipment.
Relevant Projects
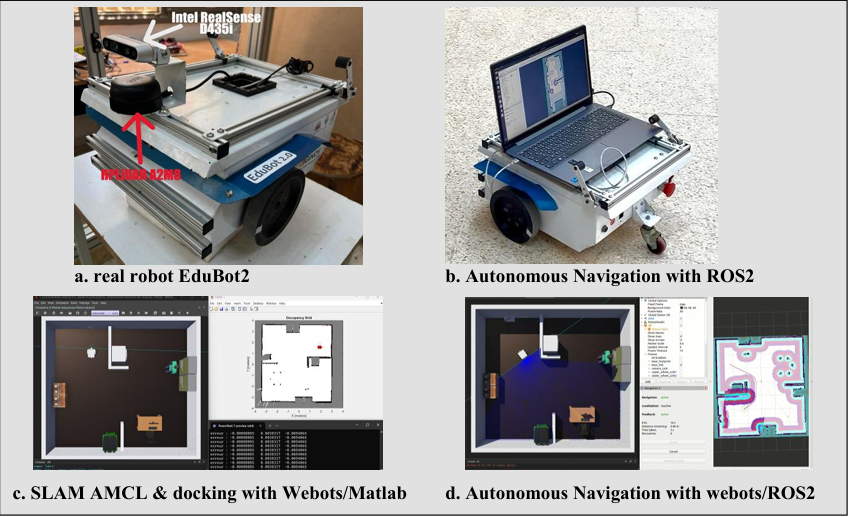
EduBot2 Autonomous Navigation System (Master’s Thesis) | Jan -> Jun 2025
- Built a ROS 2-based navigation system using SLAM Toolbox and Nav2.
- Developed simulation on MATLAB/Webots and deployed on real robot with LiDAR & RGB-D.
-
Video Demo Code
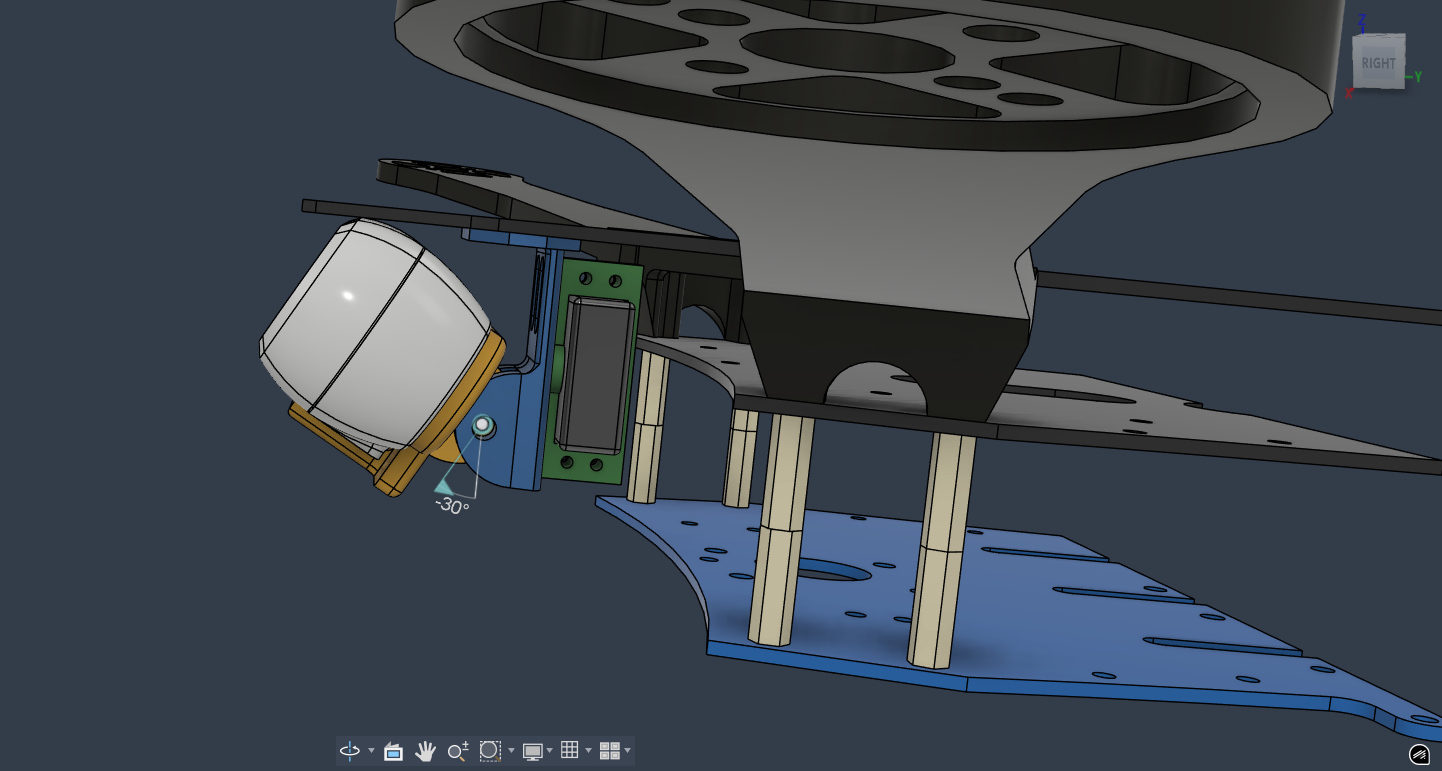
Actuated Camera Mount System Design (SolidWorks, Fusion, Inventor) jan -> feb 2026
- Designed and modeled an actuated camera mount system in SolidWorks, including full part design, assembly structure, and technical drawings.
- Re-designed the complete system in Autodesk Fusion and Inventor to strengthen cross-platform proficiency.
-
Strengthened my skills in parametric modeling, constraints, joints, and drawing generation across different CAD platforms.
-
In Solidworks: Solidwork video 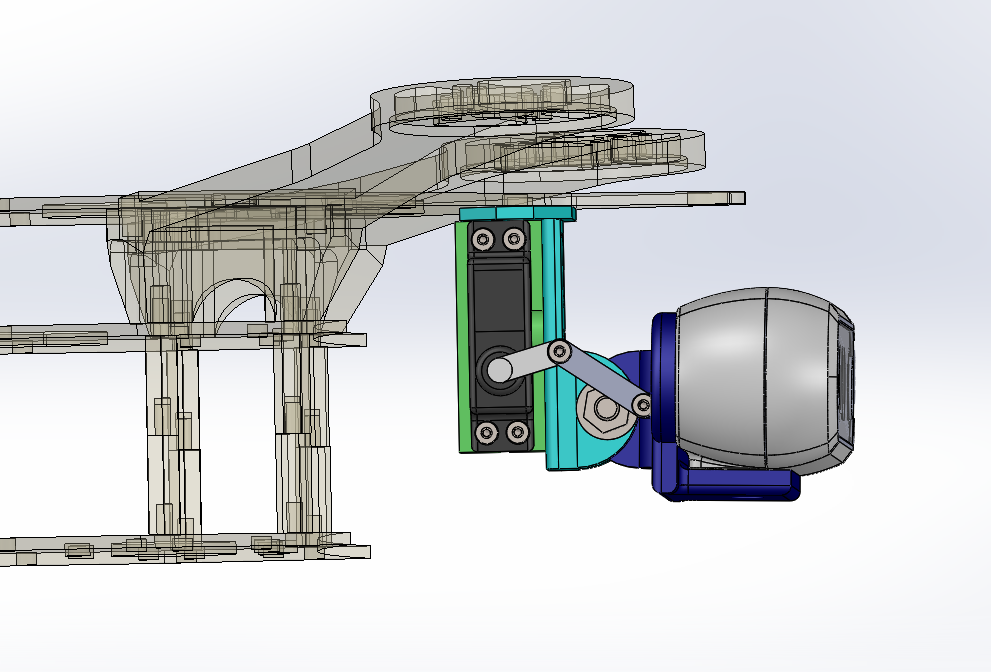
-
In Autodesk Inventor: Inventor Video 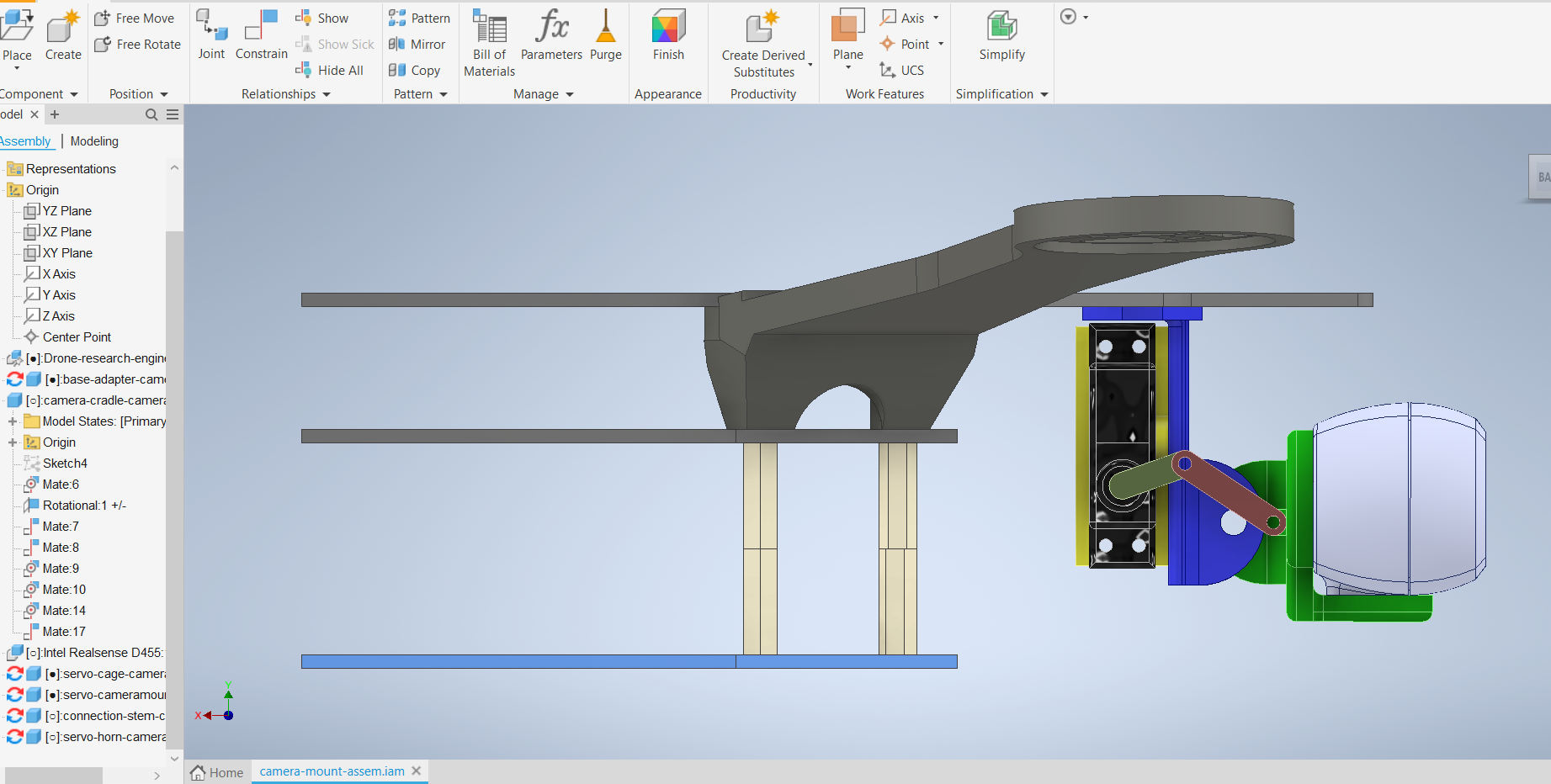
-
In Autodesk Fusion 360:
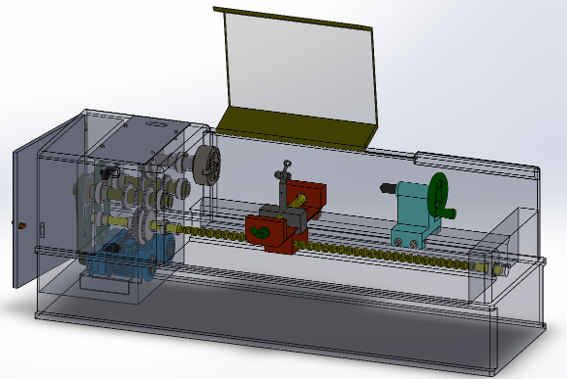
Automatic Welding Machine (Bachelor’s Thesis) | feb -> jun 2023
- Designed & simulated an automated welding system in SolidWorks.
- Performed structural analysis, motor integration, and feasibility studies.
-
Video Demo
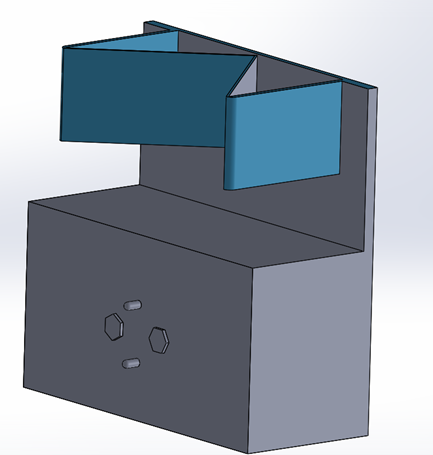
Docking Station for Autonomous mobile robot EduBot2 (Master thesis)
The docking station was designed as a mechanically simple but robust structure, featuring:
- A V-shaped guiding geometry to passively correct lateral misalignment during docking
- A fixed base compatible with indoor laboratory environments
-
Mechanical constraints ensuring repeatable robot positioning during charging

Semi-Automatic Electric Stapler
The objective of this project was to convert a fully pneumatic stapler into a semi-automatic electric system, The project involved the following mechanical and electromechanical modifications:
- Replacement of the pneumatic actuation system with an electric actuation mechanism
- Design and integration of mechanical support for: o Electric actuator o Sensor housing
- Mechanical adaptation of the stapler body to accommodate new components
- Preservation of the original stapling mechanism to ensure reliability
-
Video Demo 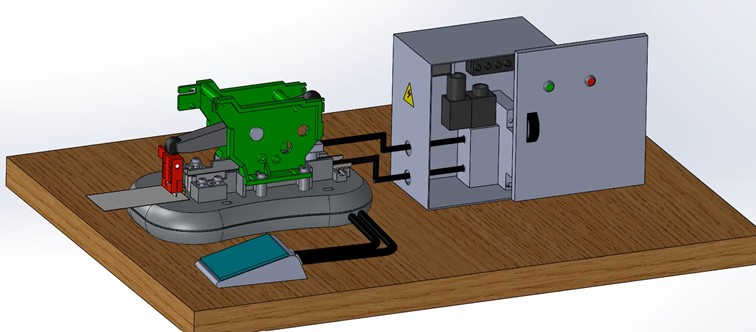
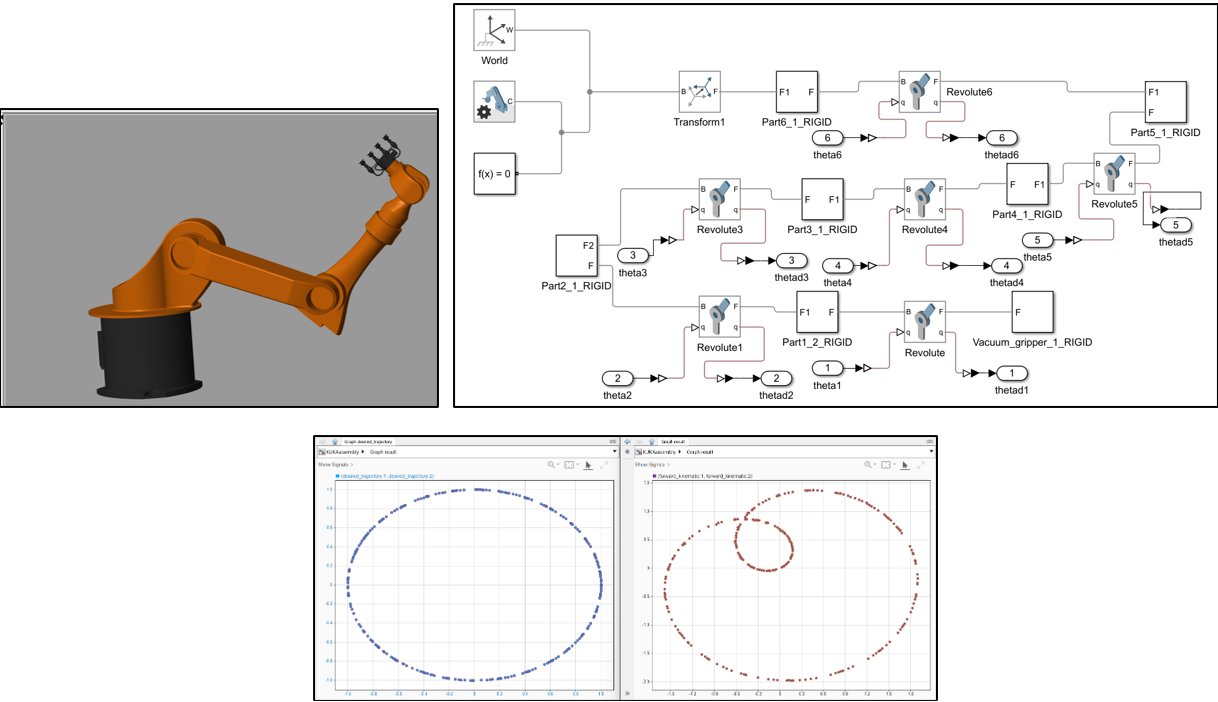
Simulation & Control of KUKA KR16 | Oct 2024
- Simulated KUKA KR16 robot with SolidWorks → Simscape model.
- Implemented inverse kinematics & PID tuning for precise 6-DOF control.
-
.See Report Code
Pubications and Contributions
- Contributor to AfROB’s 2025 State of Robotics in Africa (SORA) Report:
- Industry – Agriculture Deep Dive
- Research & Innovation – High-output Academic Research Program
- Open-source autonomous robot simulation:
- Published open-source repository of EduBot2 autonomous robot simulation with ROS 2 packages and controllers.
Skills
- Mechanical Design & Simulation:
| SolidWorks | Fusion 360 | Autodesk inventor | CATIA | MATLAB/Simulink | Abaqus | Technical drawings | Design for manufacturing | Finite Element Method | MATLAB/Simulink |
- Mechanical production & Engineering:
| Machining processes (turning, milling) | welding | forming processes | Production systems | CNC machining basics | Mechanical systems troubleshooting | Materials selection |
- Control, Automation & Robotics:
| Control systems (PID, trajectory tracking) | ROS2, SLAM, navigation | Sensor fusion (LiDAR, IMU, odometry) | Embedded systems | robot simulation(Webots, Gazebo, RViz) | Industrial robotic arms |
- Programming & Data Analysis:
| Python | NumPy | Pandas | Matplotlib | C/C++ (embedded control) | Git/GitHub | Linux (Ubuntu environment, bash scripting, ROS development) |
- AI & ML:
| Linear and logistic Regression | TensorFlow, Keras, Scikit-learn | Reinforcement learning (basics) |
- Experimental Methods:
| Sensor integration (LiDAR, encoders, cameras) | Data acquisition & calibration | prototyping (3D printing, mechanical assembly) | Real-robot experiments & validation |
- Research & Communication:
| Scientific writing | Literature review & bibliographic research | Data visualization & technical presentations |
Languages
| French | English | Spanish |
| Native/Bilingual | Full professional proficiency | Basic |